

盤(pán)給袋式真空包裝機(jī)")
")
")
全自動(dòng)真空包裝機(jī)熱成型工作原理
發(fā)布日期:2018-04-25
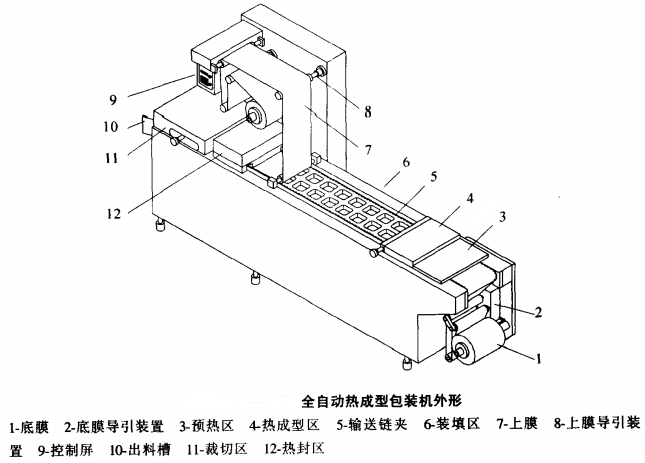
圖所示是NRB320全自動(dòng)真空包裝機(jī)熱成型包裝機(jī)的外形圖?;緳C(jī)型由以下幾部分組成:薄膜輸送系統(tǒng)、上下膜導(dǎo)引部分、底膜預(yù)熱區(qū)、熱成型區(qū)、裝填區(qū)、熱封區(qū)、分切區(qū)及控制系統(tǒng)等組成,另配碎料及邊料回收裝置。整機(jī)采用模塊式結(jié)構(gòu)設(shè)計(jì),可根據(jù)用戶需要增減各種裝置,從而增減改變各種功能。各部分裝置的工作原理分述如下。
(1)薄膜愉送系統(tǒng)
全自動(dòng)真空包裝機(jī)熱成型包裝由于采用卷筒薄膜成型包裝,因此需要薄膜牽引輸送裝置。在工作中,底膜由預(yù)熱成型至封合分切的全過(guò)程中均受到夾持牽引作用,其動(dòng)力來(lái)自沿機(jī)器縱向兩側(cè)配置
的傳送鏈條。鏈條上每一節(jié)距均裝配有一個(gè)夾子。這些夾子可自動(dòng)將底腆夾住并由始至終。傳送鏈條以連續(xù)步進(jìn)的方式將底膜從機(jī)器始端送到終端。標(biāo)準(zhǔn)機(jī)型的鏈條由一個(gè)雙速三相電機(jī)驅(qū)動(dòng),進(jìn)給時(shí)采用高速,在每個(gè)步進(jìn)停止前自動(dòng)切換成低速運(yùn)行,使其能準(zhǔn)確地停止在每個(gè)步進(jìn)的終止位置。作為選擇可采用步進(jìn)電機(jī)驅(qū)動(dòng),實(shí)現(xiàn)電子控制無(wú)級(jí)調(diào)速。這種驅(qū)動(dòng)方式可使鏈條的運(yùn)行速度在每個(gè)進(jìn)給的起始階段均勻加速,而在終止階段逐步減速。采用這種驅(qū)動(dòng)方式可避免在包裝圓形物體或液體時(shí)由于鏈條的快速起動(dòng)或急速停止而使包裝物從托盤(pán)中滾出或?yàn)R出。
(2)上下膜導(dǎo)引部分
全自動(dòng)真空包裝機(jī)熱成型包裝上下膜分別裝在上下退紙輥上,受牽引松卷,經(jīng)導(dǎo)轆、搖輥或浮輥導(dǎo)引拉展開(kāi)并送入機(jī)器。其中上卷膜在被牽引愉送過(guò)程中,有一光電定位裝置識(shí)別其印刷光標(biāo),使卜膜圖案準(zhǔn)確定位在母?jìng)€(gè)成型托盤(pán)的上方,實(shí)現(xiàn)精確包裝。另外,在上卷膜進(jìn)人熱封區(qū)之前,可裝配一個(gè)打印裝置,一般為自帶動(dòng)力的墊甩輪印字機(jī)。通過(guò)電控實(shí)現(xiàn)同步日期及批號(hào)的打印。
(3)底膜預(yù)熱區(qū)及熱成型區(qū)
底膜在成型之前需要加熱。為了提高生產(chǎn)率,實(shí)現(xiàn)快速成型,因此在熱成型區(qū)之前設(shè)有預(yù)熱區(qū),使底膜進(jìn)人熱成型區(qū)之前已其一定溫度,從而使熱成型區(qū)的升溫時(shí)間可縮短。根據(jù)薄膜的軟硬程度,厚薄和材質(zhì)的不同,其成型溫度也有所不同。同時(shí),可提供的熱成型方式也有多種選擇,包括氣壓成型、真空成型、沖模成型等。
(4)裝填區(qū)
底膜成型后進(jìn)人裝填區(qū).這是比較靈活的一部分,可根據(jù)包裝物料的不同配備相應(yīng)的裝填機(jī).或者采取人工裝填。這一區(qū)的長(zhǎng)度可根據(jù)需要制造,以便裝填操作。
(5)熱封合區(qū)
已經(jīng)裝填物料的托盤(pán)底膜進(jìn)人熱封合區(qū)的同時(shí),在其上方覆蓋上膜。熱封區(qū)內(nèi)裝配有熱封模板,由氣缸馭動(dòng),熱封校板內(nèi)帶電熱管。由溫控元件控制其加熱溫度。通過(guò)熱封模板可將上膜與托盤(pán)底膜熱壓封合。熱封溫度和熱封時(shí)間由電控設(shè)定,以適應(yīng)薄膜的不同厚度或不同材質(zhì)。根據(jù)需要在熱封合民可安裝真空和充氣裝置以實(shí)現(xiàn)真空或真空充氣包裝。同樣,真空度和充氣量可山電控裝置控制。真空或真空充氣包裝可延長(zhǎng)食品的貨架期,對(duì)食品的保鮮保質(zhì)非常重要。
(6)分切區(qū)
熱封后形成了排列整齊的包裝,俱這些包裝是連在一起的。必須要進(jìn)人分切區(qū)進(jìn)行橫切縱切等工序,才能獲得一個(gè)個(gè)獨(dú)立的成品包裝。根據(jù)薄膜厚薄、軟硬、材料和分切形狀要求,可配備不同的分切模塊。
(7)邊料回收裝置
分切過(guò)程中的邊條薄膜由收集器收集。根據(jù)薄膜的軟硬和分切方法的不同可采用真空吸出、破碎收集或纏線繞卷的方式。
(8)控制系統(tǒng)
由于全自動(dòng)真空包裝機(jī)采用模塊化組合式結(jié)構(gòu)設(shè)計(jì),每一模塊為一相對(duì)獨(dú)立的整體。在包裝過(guò)程中,各模塊結(jié)構(gòu)之間的運(yùn)動(dòng)關(guān)系有著極嚴(yán)格的要求,需要相互精確定位、協(xié)調(diào)銜接。因此,全自動(dòng)真空包裝機(jī)的自動(dòng)控制非常重要。電控系統(tǒng)可采用編程控制器或微處理器。可將包裝短序通過(guò)控制器鍵盤(pán)輸人存儲(chǔ)器中,機(jī)器啟動(dòng)后,控制器就根據(jù)儲(chǔ)存的程序來(lái)控制機(jī)器的運(yùn)作。一些主要數(shù)據(jù)如壓縮空氣壓力、真空度、成型溫度、批量號(hào)等均可輕易修改以適應(yīng)工作狀態(tài)的變化。

關(guān)注“古川機(jī)械”查看包裝機(jī)械視頻!
|給袋式包裝機(jī)|包裝機(jī)械一站式平臺(tái)")

